








































Простые 3D-печатные роботы Android Arduino для Android
LittleBots были созданы, чтобы быть простым введением в робототехнику. Он показывает все необходимые компоненты робототехники, зондирования, принятия решений и артикуляции в красивой, простой в сборке упаковке.
LittleBot полностью напечатан в 3D, что позволяет собирать его только с 3 винтами (7, если вы слишком усердны). Он также контролируется и Arduino Nano, чтобы воспользоваться преимуществами мирового сообщества вокруг этого. LittleBot обычно имеет несколько режимов, включая блуждание, дистанционное управление (с приложением для Android), следование по линии и следование по стене. Код для всего этого доступен на странице загрузок сайта LittleBots. Все файлы 3D-печати для LittleBot доступны на Thingiverse, а совместимые детали можно приобрести на веб-сайте LittleBots. Код Arduino находится на странице загрузки LittleBots.
LittleBots .STL 3D Printing Files
Что понадобиться
2x Continuous Rotation Servos
1x Meped/LittleBot PCB
1x Arduino Nano
1x HC-06 Bluetooth Module
1x Ultrasonic Sensor
1x 6v 4 AA Battery Holder
Для добавления Gripper
MG90S Servo
1. Вставьте два сервопривода непрерывного вращения в основание так, чтобы их провода выходили сзади.
2. Закрепите одним винтом сервомотора на стороне якоря сервомотора. (вы можете использовать 2 винта, но они не нужны)
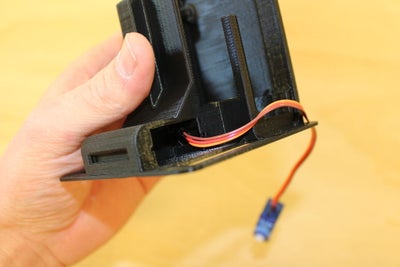
Примечание: чтобы помочь запустить провод через заднее отверстие, вы можете использовать плоскогубцы с иглами, а не пальцы
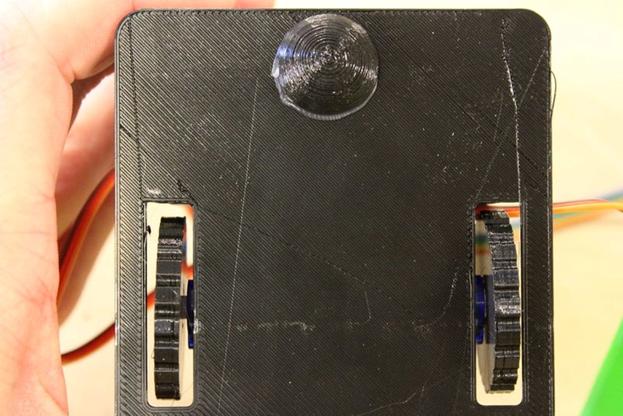
1. Вставьте рупор сервопривода в паз на каждом колесе. (Убедитесь, что он хорошо сидит)
2. Наденьте колесо на сервоарматуру.
3. Закрепите колесо с помощью винта

Приклейте поворотный элемент к центральной задней части основания.
Примечание: способность LittleBot перемещаться по различным поверхностям основана на этом повороте. Чем он выше и, следовательно, чем дальше он наклоняется, тем больше вес на ведущих колесах. Но он может наклониться так далеко вперед, пока не станет склонным к падению, когда кто-то быстро бросит его назад.
Если после сборки. Ваш LittleBot, кажется, не получает очень хорошую тягу. Нанесите под него более толстый слой горячего клея, чтобы слегка наклонить его вперед.
(К вашему сведению: другие способы улучшить движение - это протекторы горячего клея на колесах и увеличение мощности на колесах в программном обеспечении Arduino)
Соберите Gripper(захват)

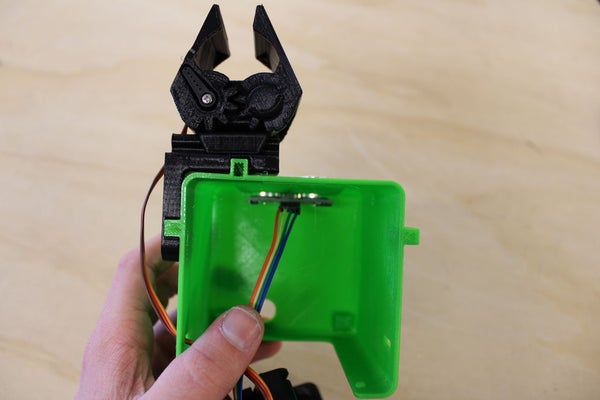
Прикрепите захват к корпусу

1. Прикрепите готовый захват к корпусу Littlebot, надев его на монтажные выступы.
2. Пропустите сервопривод через боковой паз.
Подготовка модуля Bluetooth

Чтобы вписаться в Littlebot, модуль Bluetooth должен лежать почти ровно на плате. Используйте плоскогубцы, чтобы согнуть провода. Будьте осторожны, чтобы не сломать их.
Примечание: убедитесь, что вы загрузили эскиз Arduino в Arduino, прежде чем подключить модуль Bluetooth. Bluetooth и USB мешают друг другу. Если Bluetooth подключен, когда USB подключен, скетч не будет загружен.
Подготовьте ультразвуковой датчик
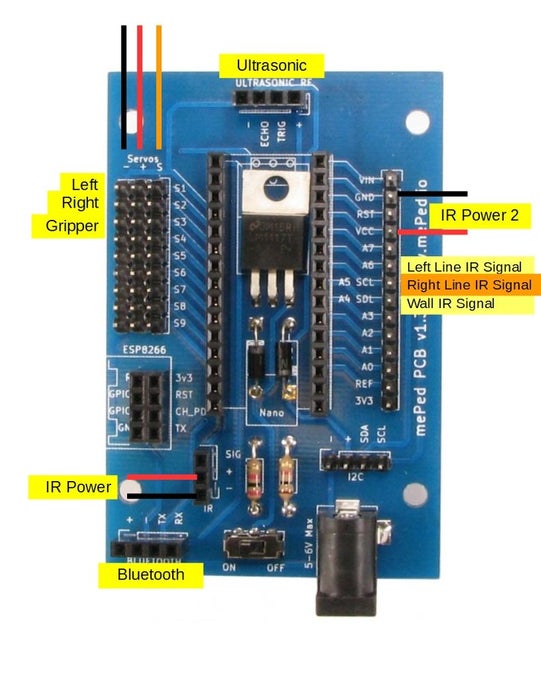
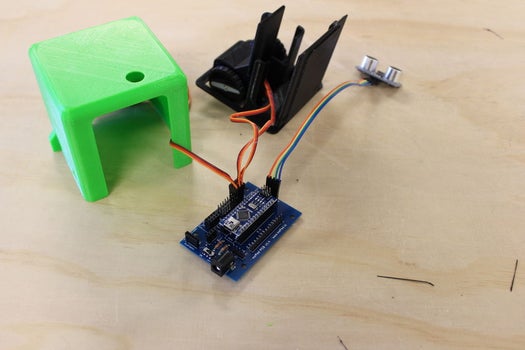
Используйте 4 соединительных провода «мужчина-женщина» для подключения ультразвукового датчика к плате мепедов. Убедитесь, что провода подключены к одинаковым обозначенным местам на датчике и на плате.
Монтаж ультразвукового датчика в голове. Вдавите ультразвуковой датчик в глазные отверстия головы.
Используйте схему подключения для серво и ультразвукового датчика.
1. Вставьте плату в пазы на задней части основания. Если хотите, вы можете закрепить плату с помощью крепежного винта с сервоприводом в верхнем правом углу платы.
2. Как только вы закрепите доску. Подключите модуль Bluetooth
Вставьте батарейный блок в паз в центре основания.
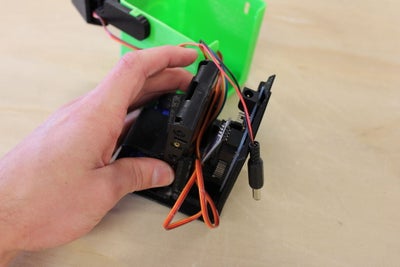
Пропустите провод аккумулятора через верхнюю часть головки и прижмите корпус к основанию, пока он не защелкнется на месте.

И вы закончили сборку LittleBot.
В начало обзора




