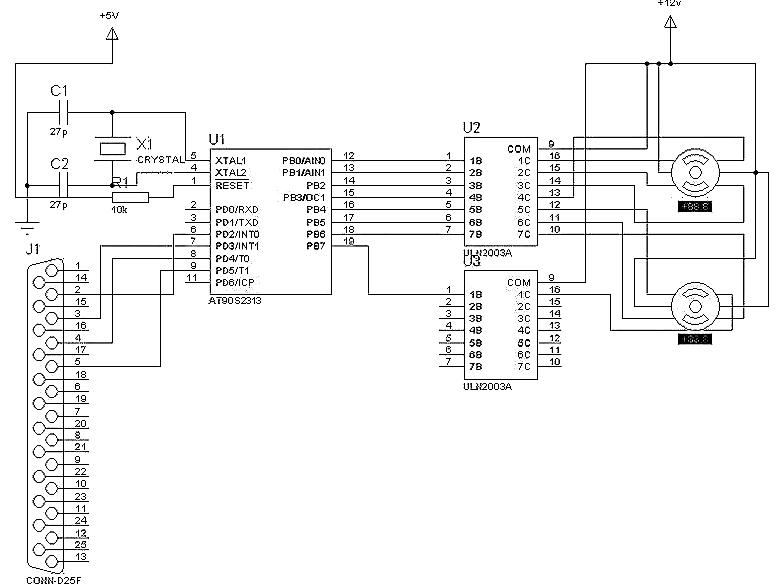






































Блок управления ШД
Интефейсный разъем DRB-25
|
Контакт |
Название |
Назначение |
|
1 |
SHPIND |
Включение шпинделя |
|
2 |
Z_STEP |
Шаг по оси Z |
|
3 |
Z_DIR |
Направление шага по оси Z |
|
4 |
Y_STEP |
Шаг по оси Y |
|
5 |
Y_DIR |
Направление шага по оси Y |
|
6 |
X_STEP |
Шаг по оси X |
|
7 |
X_DIR |
Направление шага по оси X |
|
8 |
A_STEP |
Шаг по оси A |
|
9 |
A_DIR |
Направление шага по оси A |
|
10 |
Z_LIM |
Концевики по оси Z |
|
11 |
Y_LIM |
Концевики по оси Y |
|
12 |
X_LIM |
Концевики по оси X |
|
13 |
A_LIM |
Концевики по оси Z |
|
14 |
- |
Не используется |
|
15 |
- |
Не используется |
|
16 |
- |
Не используется |
|
17 |
- |
Не используется |
|
18 |
- |
Не используется |
|
19…25 |
GND |
Общ |
Название осей X, Y, Z, A условно. Они абсолютно равнозначны и могут быть
использованы на ваше усмотрение.
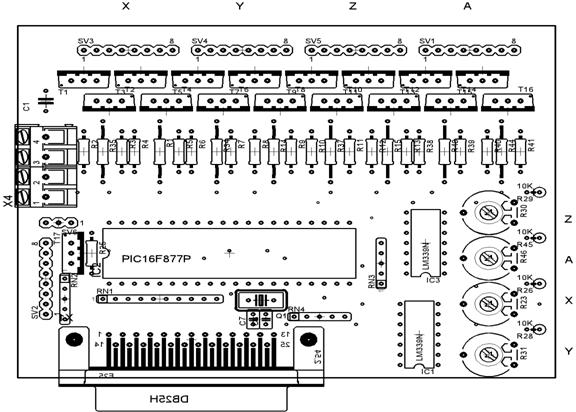
Кабель

Размещение элементов
на плате
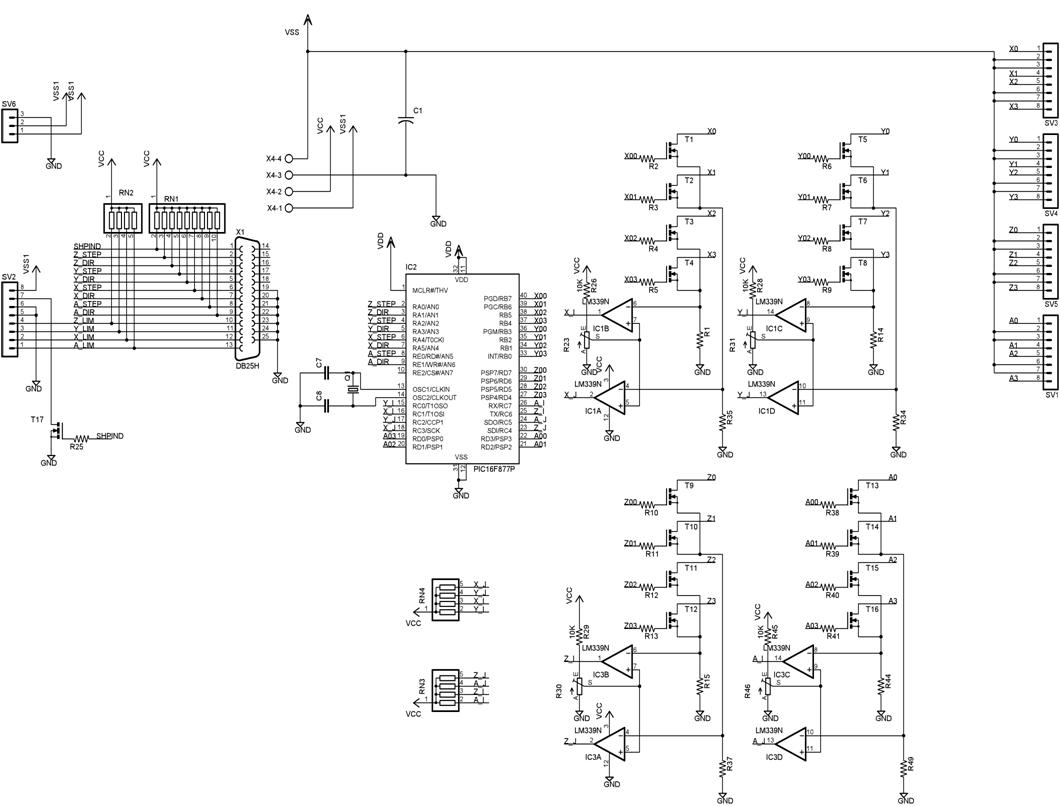
Схема
Разъем питания
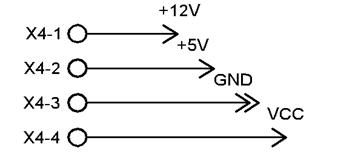
VCC
– напряжение питания двигателей
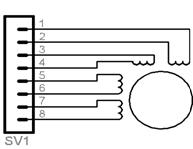
Подключение
двигателей
|
Восьми выводный униполярный двигатель |
|
|
Шести выводный униполярный двигатель |
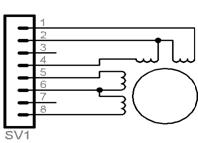 |
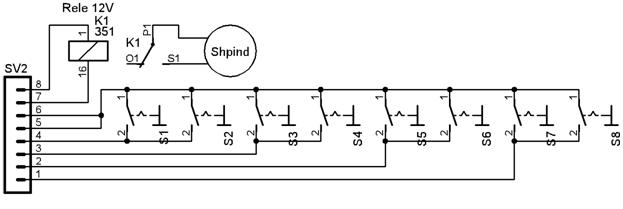
Подключение шпинделя
и концевиков
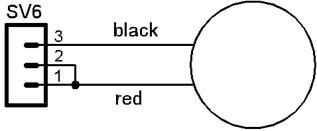
Подключение
вентилятора
Програмное обеспечение Kcam4, Master5, JalaCNC, Mach1 и др. с управлением по LPT
ПРЕДУПРЕЖДЕНИЕ.
Все подключения выполнять при отключенном напряжении питания компьютера и
контроллера.