Изготовление платформы AMP для движущихся роботов
Статьи публикуются по мере поступления. Для упорядоченного тематического
поиска воспользуйтесь блоком "Карта сайта"
AMP - открытая платформа с открытым исходным кодом для построения гетерогенных (GPU+CPU) приложений на C. Радиолюбители и профессионалы в основном используют при разработке небольших автономно движущихся роботов.
Весь проект основан на ATmega328-AU (SMD версия печально известного ATmega328) от Standand Arduino Pro Mini загрузчика. Следовательно, плата может быть легко запрограммирована с использованием платформы Arduino IDE. Что касается программирования аппаратных средств, существуют два интерфейса для пользователя, чтобы загрузить его / ее кода. Существует заголовок FTDI со стандартным расположением контактов (на левой стороне платы с надписью «FTDI master "), и заголовок ISP (помеченный как "ISP") для использования с совместимым Atmel SPI программатором. Инструмент, используемый здесь для загрузки кода в плату классический FTDI FT232 USB. Микроконтроллер работает от 5V DC.
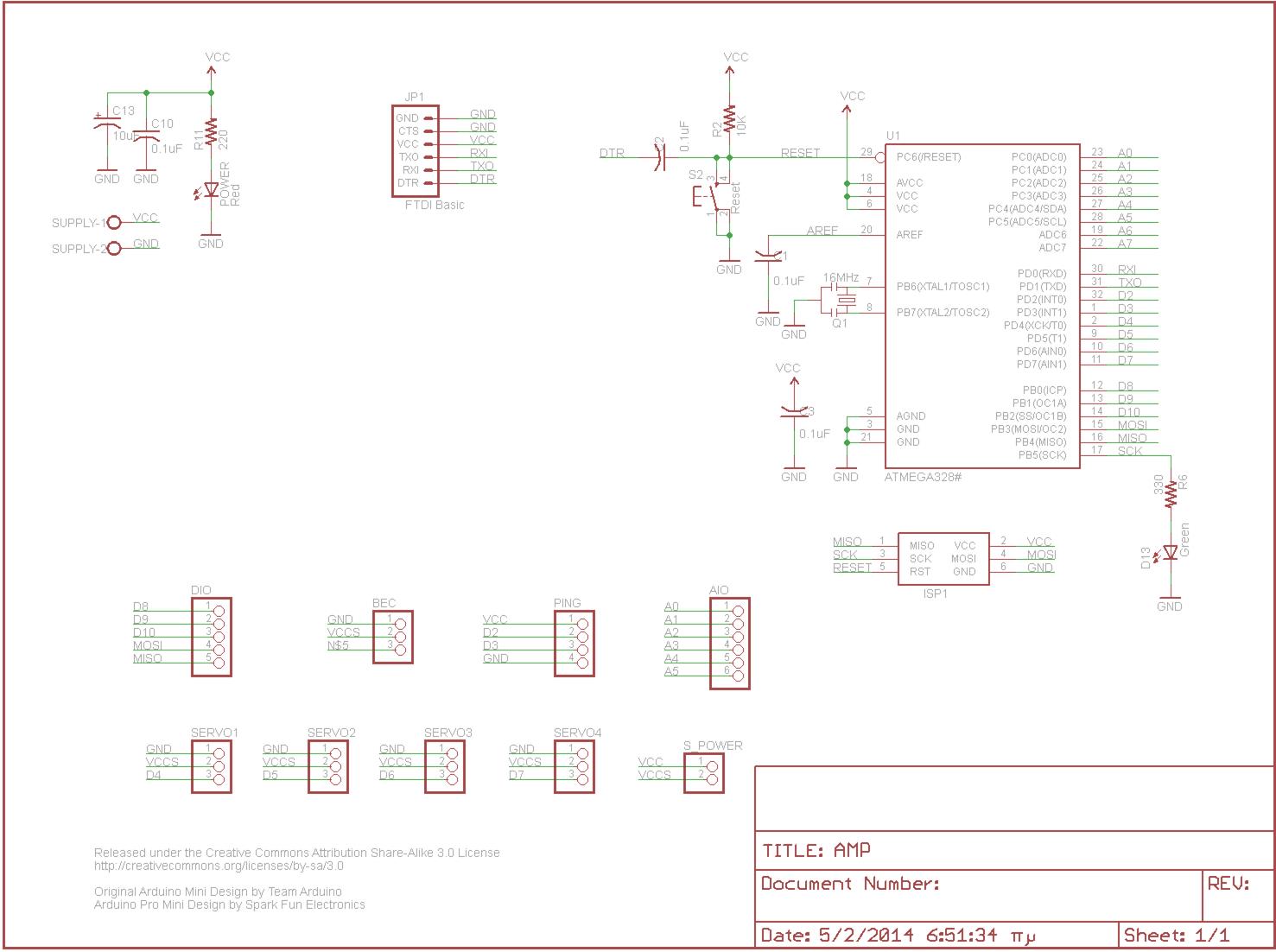
Принципиальная схема
Робот использует 2 сервопривода вращения для его движения, если настроен как колесный робот, и три сервопривода вращения при настройке в качестве четвероногого робота. Ультразвуковой датчик PING служит для обхода препятствий. Все сервоприводы HXT900 9g. Любой стандартный 9g микро серво прекрасно подойдет вместо указанной марки.
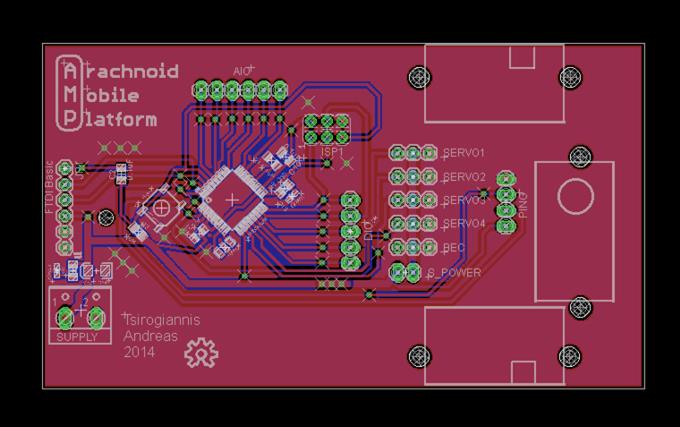
PCB макет
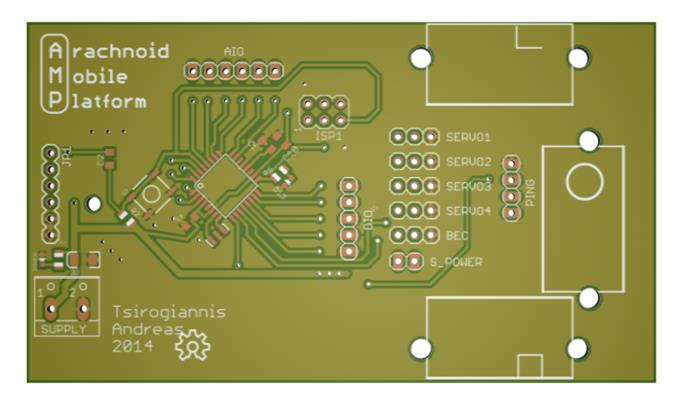
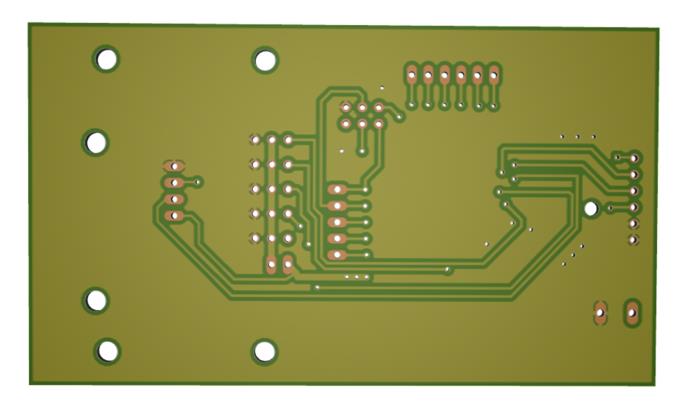
3D PCB
Плата содержит 4 вывода для прямого подключения сервопривода (с пометкой "Servo с 1 и 4"), а также для прямого интерфейса ультразвукового датчика HC-SR04 (помеченного как «PING»). Крепление ультразвукового датчика находится на центральном сервоприводе, который позволяет его включать при отклонении 30-50 градусов для того, чтобы "сканировать" окрестности и найти путь с наименьшими препятствиями.

Готовая конструкция
Один источник питания 5В, необходим чтобы запустить всю схему. Напряжение питания можно подводить к винтовым клеммам напрямую, или через UBEC.
Скачать файлы статьи
AMP.7z
Автор: Andrews Tsirogiannis
Просмотров: 1714 |
Добавил: Chinas
| Рейтинг: 0.0/0
|