Android-управляемый робот
Статьи публикуются по мере поступления. Для упорядоченного тематического
поиска воспользуйтесь блоком "Карта сайта"
Android-смартфоны, несомненно, являются самыми популярными гаджетами в наши дни. Вы найдете различные приложения в Интернете, которые используют встроенное оборудование на этих мобильных телефонах, таких как Bluetooth и Wi-Fi, для управления другими устройствами. Представленный здесь робот управляется с помощью приложения, работающего на телефоне Android. Команды управления отправляются через Bluetooth, и у робота есть такие функции, как:
1. Он может управляться с Android-смартфона при помощи сенсорных или голосовых команд
2. Скорость робота также может контролироваться
3. Робот будет ощущать и информировать телефон о расстоянии до ближайшего препятствия
4. Он также отправит информацию о направлении, в котором он движется
рис. 1: Робот
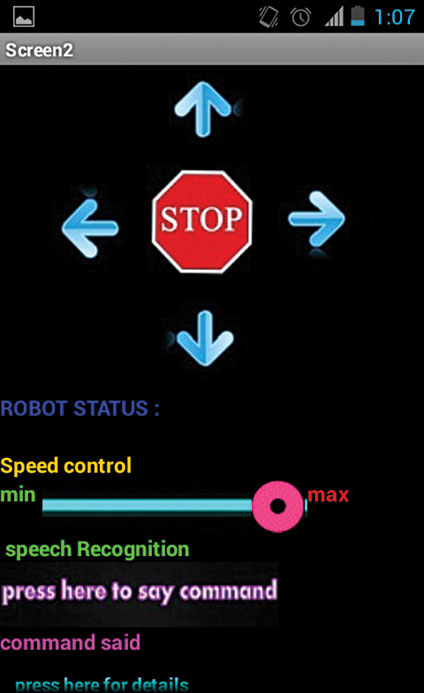
рис. 2: интерфейс приложения Android
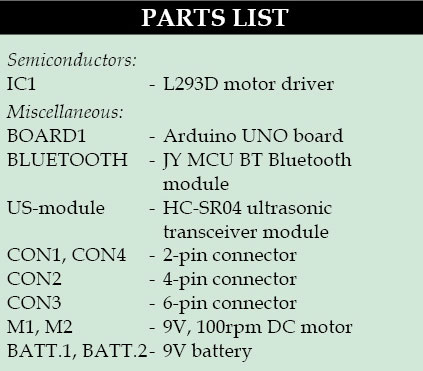
На рис 3 показана принципиальная схема робота с Android-телефоном. Схема построена на плате Arduino UNO (BOARD1), модуль ультразвукового приемопередатчика HC-SR04, модуль Bluetooth JY MCU BT, драйвер двигателя L293D (IC1), двигатели постоянного тока M1 и M2 и несколько общих компонентов.
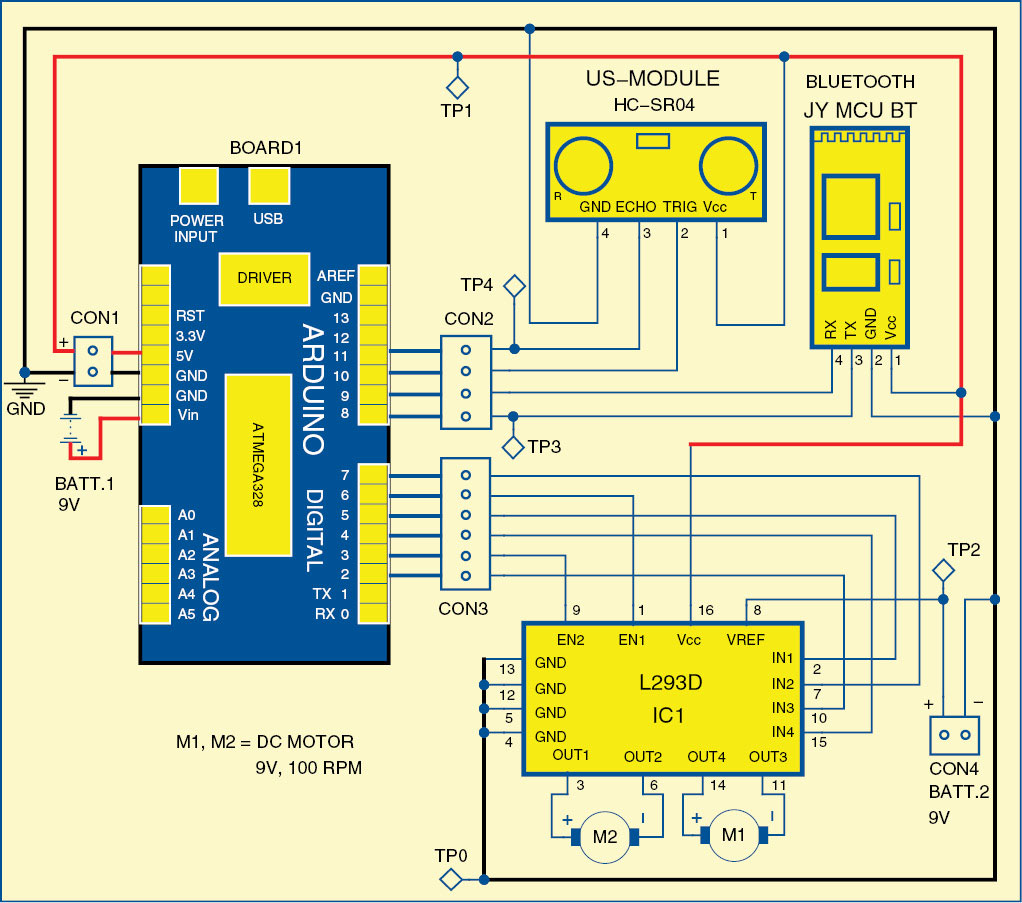
рис. 3: Схема робота с Android-управлением
рис 4: модуль Bluetooth
В схеме используются две батареи 9 В: одна для питания платы Arduino, а другая для питания двигателей, как показано на рис. 3. Регулируемое напряжение 5 В для остальной части цепи обеспечивается самой платой Arduino. Светодиод на плате указывает наличие источника питания. Модуль Bluetooth JY MCU BT, используемый в проекте, может быть подключен к любому устройству через встроенный интерфейс UART для связи с другими устройствами с поддержкой Bluetooth, такими как мобильные телефоны, карманные компьютеры и ноутбуки. Модуль работает от источника питания 3,6 В до 6 В. Модуль ультразвукового приемопередатчика HC-SR04 использует сонар, как летучие мыши и дельфины, для определения расстояния до объекта. Он предлагает отличное бесконтактное обнаружение диапазона от 2 см до 400 см с высокой точностью и стабильными показаниями и простой в использовании.
Чтобы начать измерение расстояния, контакт 2 (TRIG) модуля должен получать высокий импульс в течение как минимум десяти микросекунд. Импульс инициирует модуль для передачи восьми циклов ультразвукового всплеска на частоте 40 кГц и ожидает отраженного ультразвукового сигнала. Когда датчик обнаруживает отраженную ультразвуковую вспышку, он устанавливает контакт 3 (ECHO) в состояние «high». Продолжительность отраженного импульса зависит от расстояния от препятствия, которое может быть легко рассчитано как: Расстояние (в сантиметрах) = T / 58, где T = ширина импульса на выводе ECHO в микросекундах. Arduino Uno - плата очень проста в использовании, так как пользователю просто нужно подключить ее к компьютеру с помощью USB-кабеля или включить питание от адаптера переменного тока или аккумулятора, чтобы начать работу. Микроконтроллер на плате программируется с использованием языка программирования Arduino, используя среду разработки Arduino. Выводы 8 и 9 BOARD1 подключены к контактам Tx и Rx модуля Bluetooth соответственно. Выводы 10 и 11 подключены к контактам триггера (TRIG) и эхо (ECHO) HC-SR04. Выводы с 2 по 7 из BOARD1 являются выходными выводами, которые подключены к IC1 для управления двигателями. Выводы 2, 3 и 4 разъема BOARD1 подключены к IN3, EN2 и IN4 IC1 для управления двигателем M1, а контакты 5, 6 и 7 подключены к IN1, EN1 и IN2 IC1 для управления двигателем M2. EN1 и EN2 используются для управления скоростями двигателей. Команды управления для робота отправляются с телефона, используя приложение, показанное на рис. 2. Вы можете отправлять команды либо прикосновением к различным параметрам на экране телефона, либо через речевые команды. Вы можете обойти загрузчик и запрограммировать микроконтроллер через заголовок ICSP (внутрисхемное последовательное программирование),
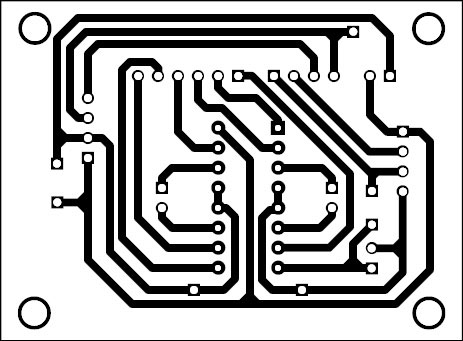
рис. 5: компоновка печатной платы
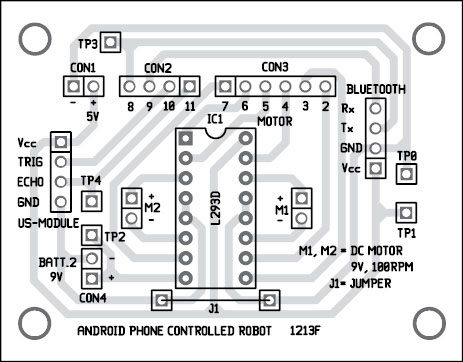
рис. 6: Компоновка для печатной платы
Загрузить исходный код: нажмите здесь
Процедура установки Android-приложения на телефоне выглядит следующим образом:
1. Загрузите приложение (Android_BOT.apk) и скопируйте его на смартфон (или планшет) Android.
2. Запустите файл, и когда он попросит вас выполнить «Полное действие», нажмите «Установка пакета» и нажмите «Установить».
3. Вам также необходимо установить голосовой поиск и приложение «текст в речь» из игрового магазина, если вы хотите управлять роботом через речь. Обратите внимание, что вам необходимо изменить скорость передачи данных модуля Bluetooth на роботе до 57600 с помощью команды AT. Плата PCB с фактическим размером, односторонняя для управляемого телефоном робота показана на рис. 5 и его компоновка на рис. 6. Соберите схему на рекомендуемой печатной плате, чтобы свести к минимуму ошибки сборки.
Выполните следующие действия, чтобы запустить робот в первый раз:
1. Обеспечьте питание робота, подключив батареи.
2. Соедините модуль Bluetooth с телефоном Android. Во время конекта он запросит у вас пароль. Введите 1234, который является паролем по умолчанию для модуля Bluetooth.
3. Запустите уже установленное приложение в телефоне. Нажмите на экране приветствия, чтобы получить основной интерфейс.
4. Выберите «Выбрать устройство» (убедитесь, что Bluetooth включен), затем выберите модуль Bluetooth из списка сканируемых устройств Bluetooth и выберите «Подключить». Подключение займет от пяти до десяти секунд. После установления соединения он сообщит вам, что Bluetooth подключен. Теперь пришло время начать играть с роботом.
5. Сдвиньте ползунок вправо (или влево), чтобы установить скорость, и выберите стрелки для перемещения робота в соответствующих направлениях.
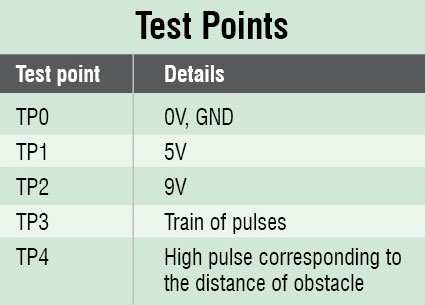
6. Чтобы управлять роботом с помощью речевых команд (вперед, назад, влево, вправо и влево), выберите «Say Command» на экране приложения. Чтобы проверить цепь на правильность функционирования, убедитесь, что для цепи в TP1 имеется правильное напряжение 5 В относительно TP0. Также проверьте подачу питания 9 В для двигателей в TP2. Передаваемые данные по Bluetooth можно наблюдать в TP3. Эхо от ультразвукового модуля можно проверить на TP4 с помощью осциллографа.
Автор - Гунтур
Просмотров: 1365 |
Добавил: Chinas
| Рейтинг: 0.0/0
|