4A Драйвер двухполюсного шагового двигателя на базе LV8727E
Статьи публикуются по мере поступления. Для упорядоченного тематического
поиска воспользуйтесь блоком "Карта сайта"
Конструкция основана на микросхеме LV8727E от ON Semiconductor. LV8727 - это управляемый по току микроподвижный шаговый драйвер с PWM-управлением. Может обеспечить восемь способов разрешения микрошагов 1/2, 1/8, 1/16, 1/32, 1/64, 1/128, 1/10, 1/20 и может управлять простым шагом. Биполярный драйвер работает от входного напряжения питания от 9В до 36В (Замените L317 на L317HVT для входного напряжения до 45В постоянного тока). Ток нагрузки до 4Amps.
Особенности
Питание от 9 до 36 В постоянного тока (замените L317 на L317HVT для питания до 45 В постоянного тока)
Ток нагрузки до 4Amps
Входы: Шаг Пульс, Направление, Включить
Микрошаг: 4-позиционный DIP-переключатель
Индикация питания
L317 для регулятора постоянного тока 5 В
Защита от сверхтока
Термическое выключение
FDT Adjust Preset (Настройка DECAY)
Одноканальный ШИМ-драйвер регулирования тока.
Выходной ток 4Amps
Micro Stepping 1 / 2,1 / 8,1 / 16,1 / 32,1 / 64,1 / 128,1 / 10,1 / 20 Step можно.
Схема
Настройки выходного тока (PR2 Preset Constant Current Setting)
Токовый выход = (VREF / 3) /0.1E (шунтирующий резистор R8, R10)
Пример: (VREF 0.9V / 3) /) 0.1E = 3Amps
Операции:
Включить (режим ожидания)
Когда вход разрешения высок, вывод ST на низких уровнях, микросхема переходит в режим ожидания, вся логика сбрасывается и находится в выключенном состоянии
Keep Enable input low (Нет входного сигнала при Enable) для нормальных операций, Применить 5V при отключении привода
Выход Jumper-J1 (J1 закрыт для нормальной работы)
Перемычка разомкнута, выход отключен и переходит на высокий импеданс. Однако внутренние логические схемы работают, поэтому положение возбуждения продолжается, когда вход STP, когда J1 закрыт, выходной уровень соответствует положению возбуждения, поступает с помощью ступенчатого входа.
Настройка режима FDT DECAY (PR1-Perst)
Текущий метод DECAY можно выбрать, как показано ниже, приложенным напряжением к выводу FDT.
От 3,5 до 5 В медленно Slow
Ингибированная зона 3.1V до 3.5V
От 1,1 до 3,1 В или открытый смешанный режим DECAY
Запрещенная зона от 0,8 до 1,1 В
От 0 до 0.8 В Fast DECAY
Примечание: Не рекомендуется изменять метод DECAY во время работы двигателя.
Примечание 01 Выход DOWN
Этот вывод включается, когда нет нарастающего фронта STEP между входными сигналами. Этот вывод используется для установки удерживающего тока, когда двигатель находится в состоянии HOLD. Его помощь уменьшает ток, когда двигатель не двигается, и он находится в позиции удержания. R4 связан для управления удерживающим током, когда двигатель находится в состоянии HOLD, значение R4, которое должно быть рассчитано согласно входному напряжению Ref, и требуемый ток удержания, см. Ниже формулу для вычисления R4
Down Output OFF: VREF = 5VXR2 / (R1 + R2) = 0,741 В
Down Output On: VREF = 5VXR2 (R2IIR4) / (R1 + (R2IIR4) = 0,126V
Примечание02 R1 и R2 делят PR2 и R4 = 1K
CN8: 3-контактный разъем
Вспомогательная выходная мощность 5V DC, GND, VDD-Напряжение питания
CN7: 2-контактный разъем для разъема
Текущий тест (напряжение)
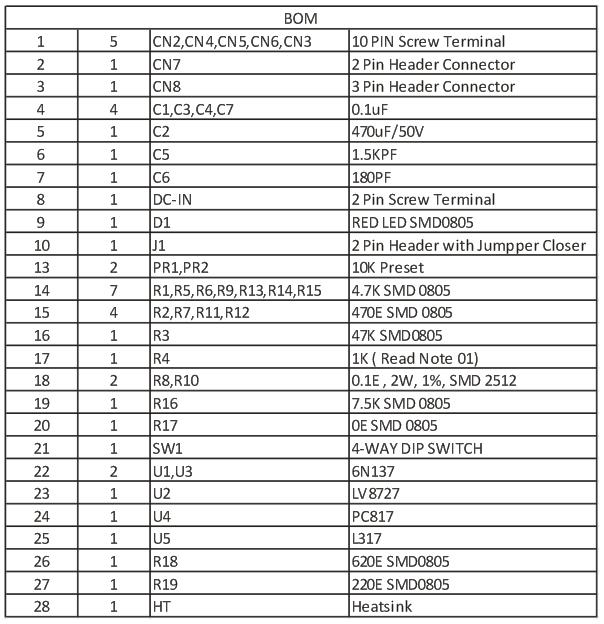
Список деталей
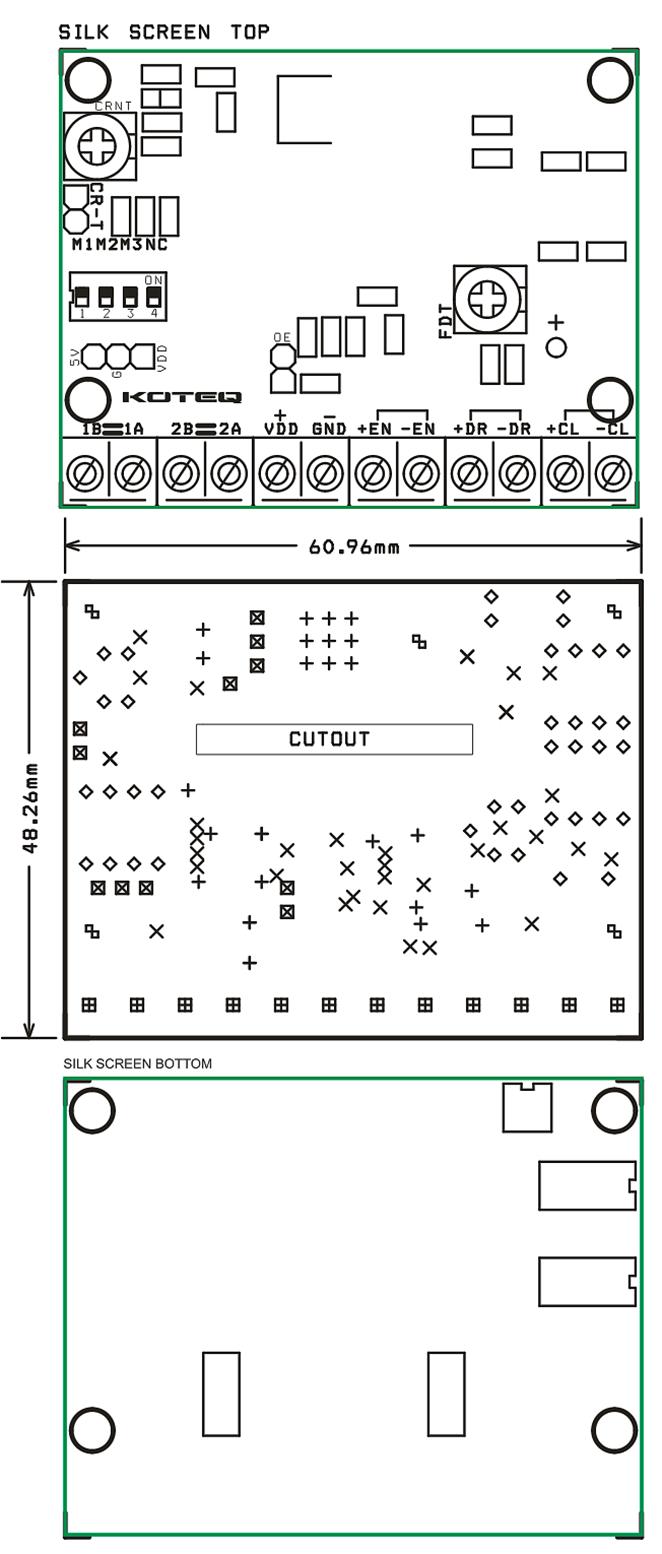
Соединения
Выбор микрошага
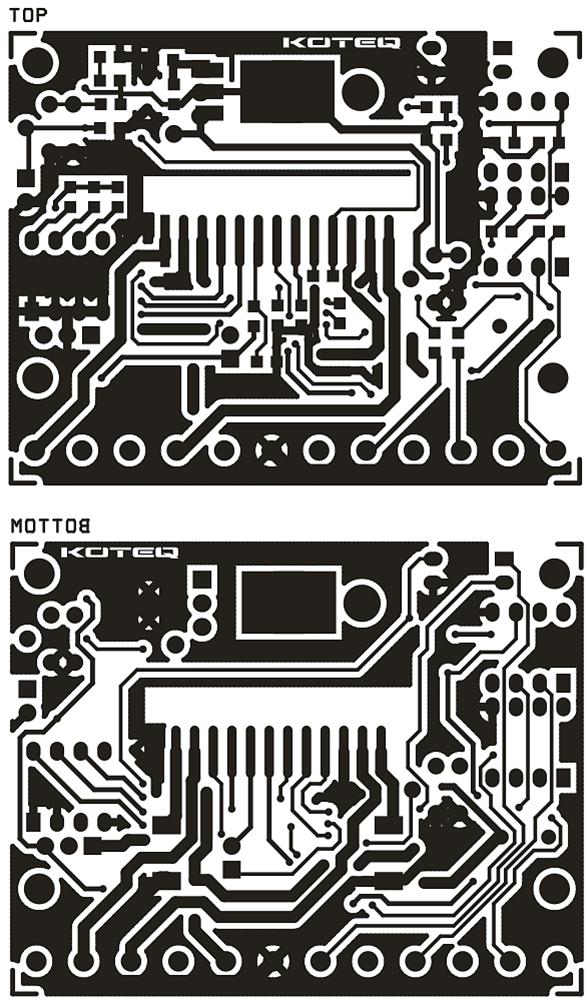
Печатная плата
Фото

Просмотров: 2857 |
Добавил: Chinas
| Рейтинг: 0.0/0
|